
坡度和坡向
n坡度是地表位置上高度变化率的量度,坡度可表达为百分数或者度数。
n坡向是斜坡方向的量度。从正北为 0°开始,顺时针移动,回到正北以360°结束。用坡向作数据分析之前,我们经常需对坡向进行转换。
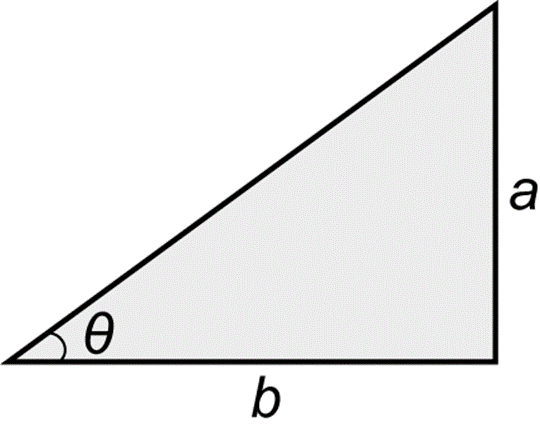
图13.12
以百分比或者度表示的坡度θ,可由垂直距离 a 和水平距离 b 计算而得。
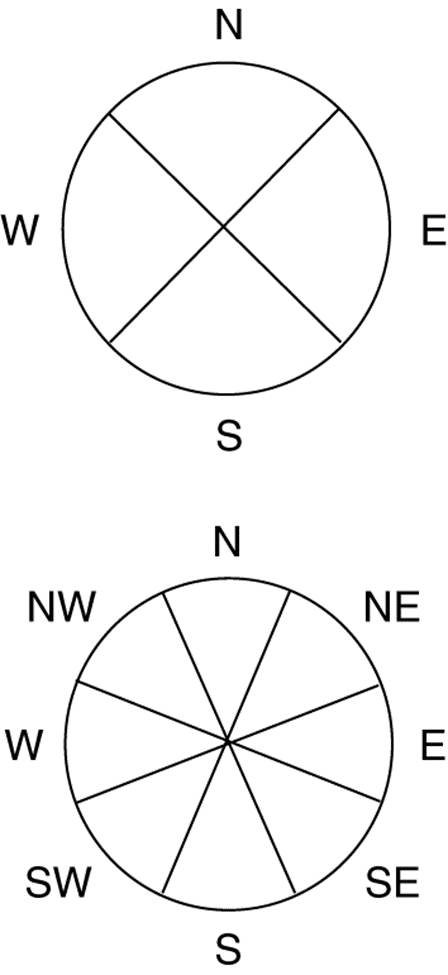
图13.13
坡向的度量常分为4个基本方向或 8个基本方向。
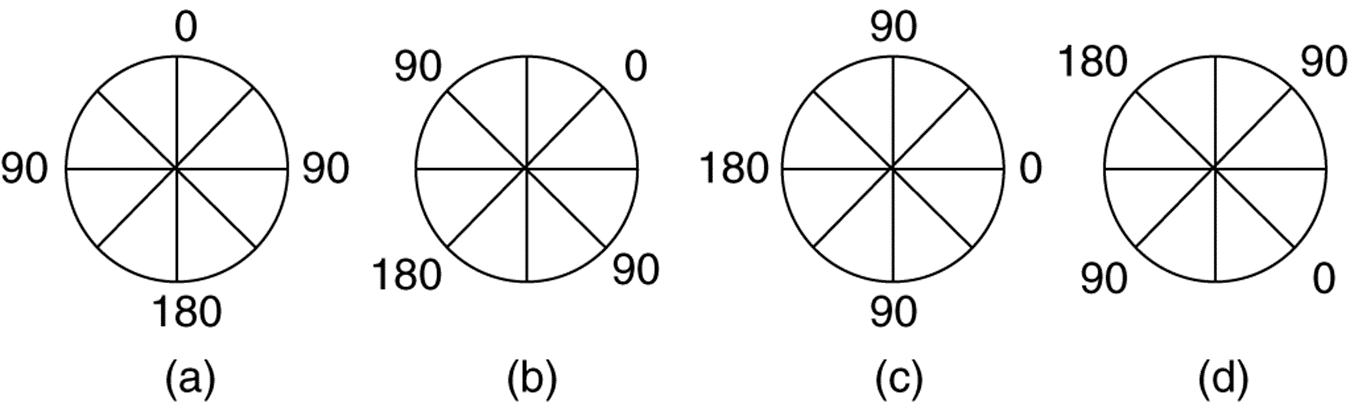
图13.14
获取N-S向 (a)、NE-SW向(b)、E-W 向(c) 和 NW-SE向(d) 等基本方向的转换方法。
用栅格计算坡度和坡向的算法
n以面为单位(例如,像元和三角形)是通过像元标准矢量的倾向和倾量来计算它们的坡度和坡向。其中,标准矢量是垂直于像元的有向直线。
n许多近似方法已被设计用于由高程栅格计算坡度和坡向。这三种方法都采用 3×3 移动窗口估算中心像元的坡度和坡向,但是,用于估算的邻接像元数和每个像元的权重各不相同。
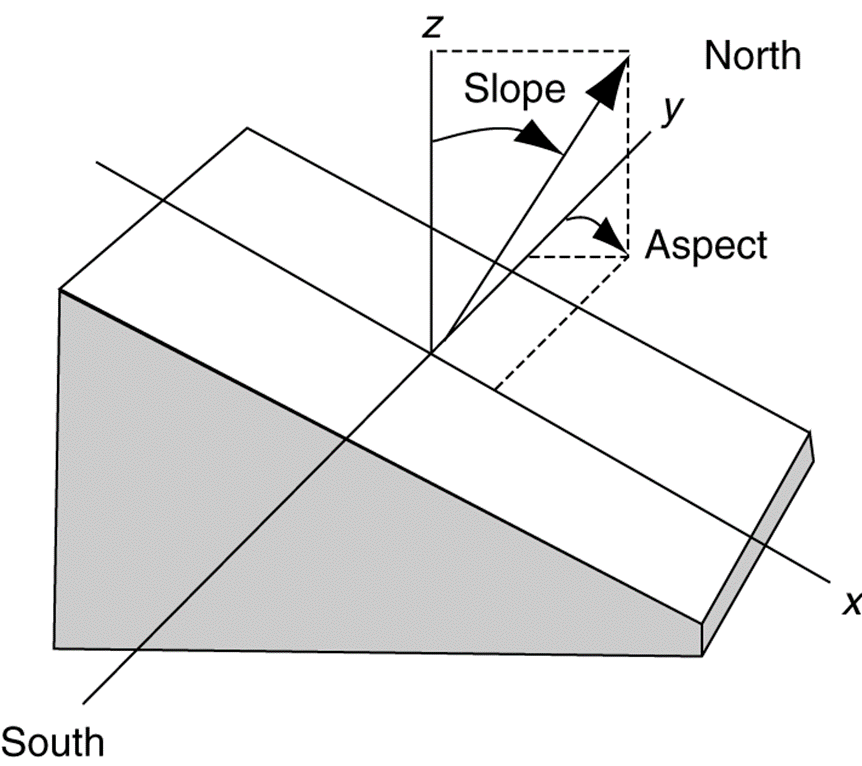
图13.15
像元的标准矢量是垂直于该像元的矢线,它的倾向和倾量决定该像元的坡度和坡向。(Redraw from Hodgson, 1998, CaGIS 25(3):pp. 173–185;经美国测绘大会许可重印)。
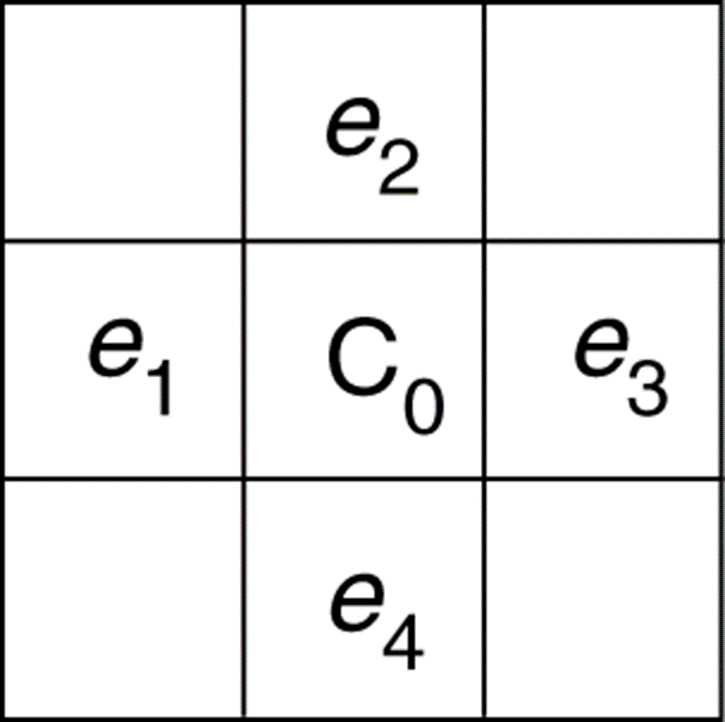
图13.16
计算C0的坡度和坡向的 Ritter 算法,采用 4 个与C0的直接邻接像元。
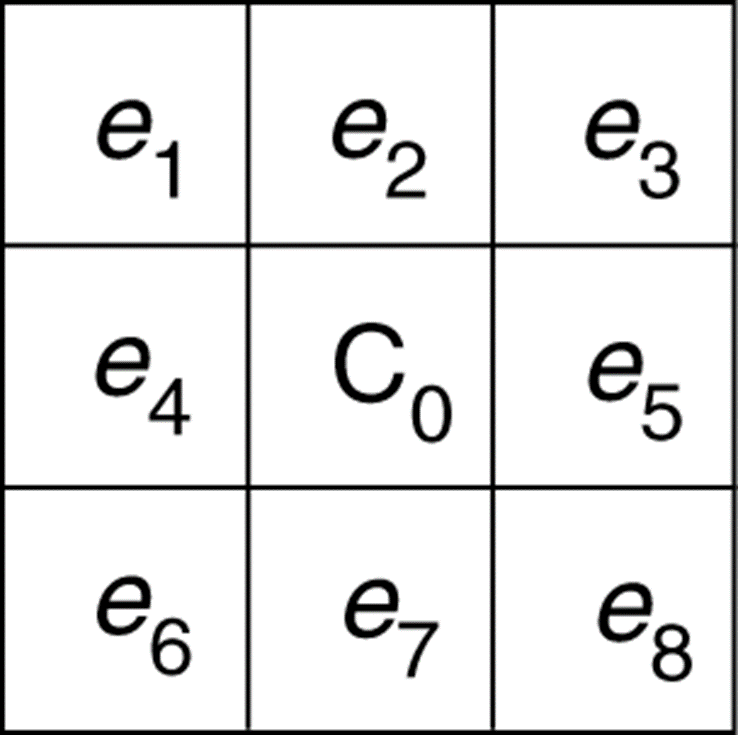
图13.17
Horn算法与 Sharpnack和 Akin 算法都采用8个与C0邻接像元来计算C0的坡度和坡向。
用TIN计算坡度和坡向的算法
用三角形三个节点上的x、y和 z值,计算 TIN 中三角形的坡度和坡向。
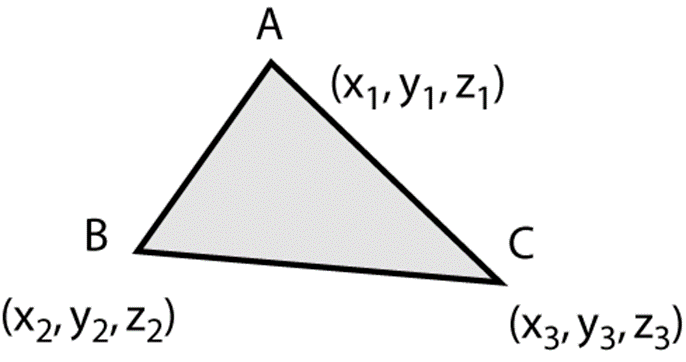
图13.18
用三角形三个节点上的x、y 和 z值,计算 TIN 中三角形的坡度和坡向的算法。
影响坡度和坡向量算的因子
生成坡度和坡向的影响因子是:
DEM 数据的分辨率;
DEM的质量;
坡度和坡向算法;
局部地形。
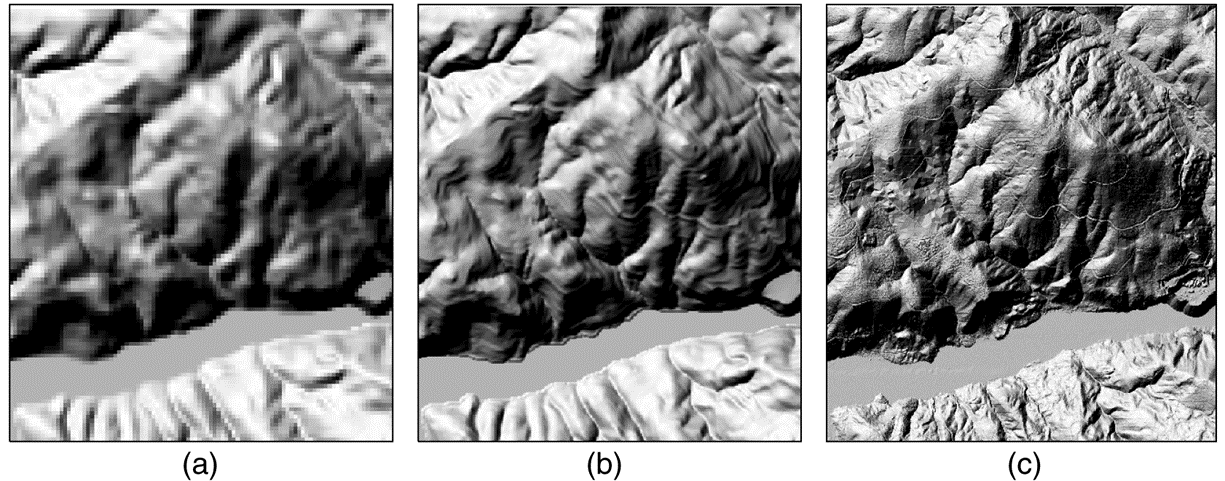
图13.19
三种不同分辨率的DEM:美国地质调查局的 30m (a) 和 10m的DEM (b) ,由LIDAR数据生成 1.83m 的DEM(c)。
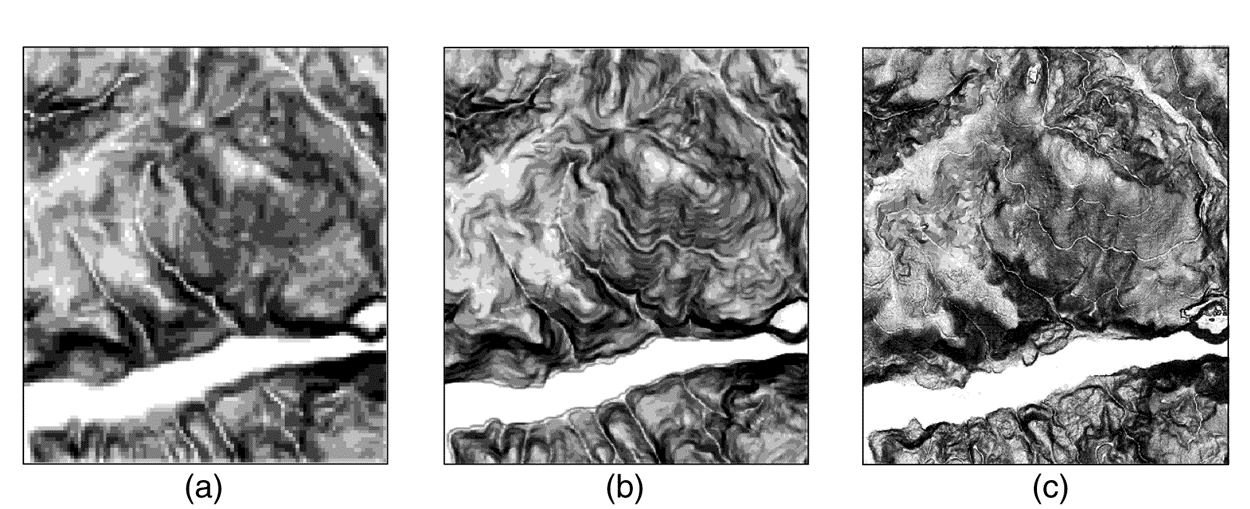
图13.20
由图13.19的三种不同分辨率DEM 生成的坡度图。随着坡度越陡,显示的符号越暗。