
数字高程模型(DEMs)
数字高程模型(DEM)由一组均匀间隔的高程数据组成。
生产 DEM的传统方法是使用一个立体测图仪和航拍照片的立体相对。
生成DEM的新技术包括光学传感器、干涉合成孔径雷达(InSAR)、激光雷达(LiDAR)。
光学传感器
为了制作DEM,需要同一地区的来自不同方向的两个或两个以上光学卫星图像。这些立体图像应是在一个短的时间间隔里获取的,这样它们的光谱特征没有显著差异。
InSAR
■InSAR使用两个或两个以上的SAR图像来生成反射表面的高度, 这可能是植物,人造要素或裸露的地面。
■例如, SRTM(航天飞机雷达地形测绘任务)的DEM,是来自放置在2000年航天飞机上的两个雷达天线采集的SAR数据。
LiDAR
激光雷达系统的基本组件包括一个安装在飞机上的激光扫描仪、GPS和惯性测量装置。
激光雷达技术的一个主要应用就是创造了高分辨率的DEM,空间分辨率为0.5到2米。这些DEM已经作了基于WGS84椭球的地理参照。因为激光雷达可以为一个发射脉冲检测多个返回信号,它能产生不同高度水平的DEM,比如地面高程(从最后返回的激光雷达)和树冠高度(从第一次返回的激光雷达)。
表 4.2 NED DEMs、 分辨率、 垂直精度和覆盖范围*
| DEM | 分辨率 | 垂直准确度 | 覆盖范围 |
| 1秒弧度 | 30 m | 2.44 m | Conterminous U.S., HI, PR, VI, and Territorial Islands |
| 1/3秒弧度 | 10 m | 2.44 m | Conterminous U.S., HI, and portions of AK |
| 1/9秒弧度 | 3 m | ~0.15 m | Limited areas in the Conterminous U.S. |
*阿拉斯加州大部分的NED 数据分辨率是2秒弧度(大约60m),部分地区的分辨率是1秒弧度和1/3秒弧度。
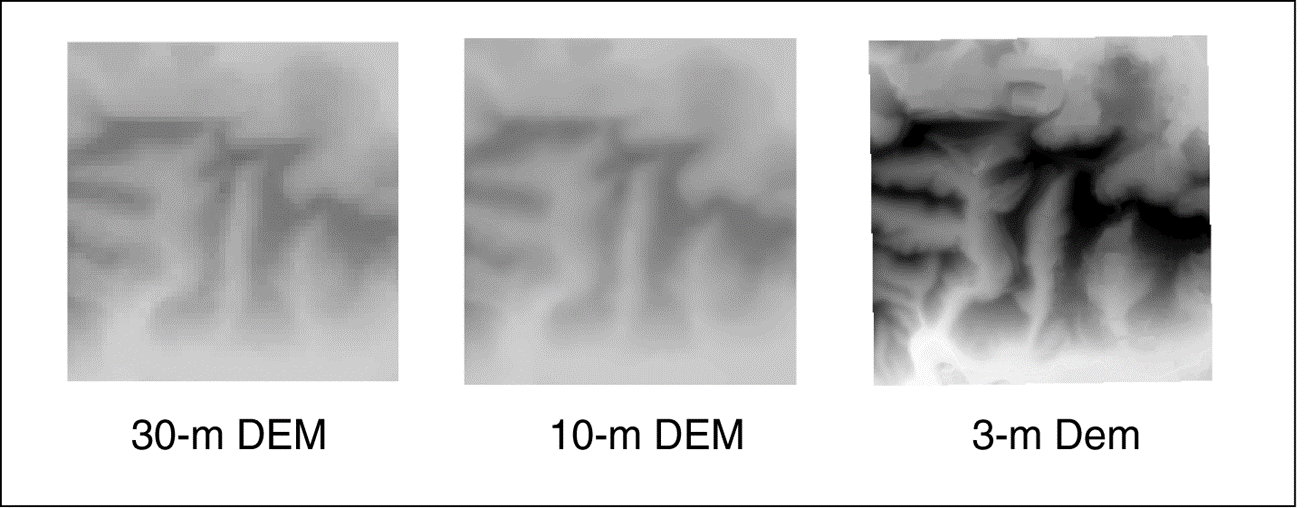
图4.4
三种分辨率的 DEM :30m、10m和3m。30m和10m的DEM 数据为 USGS DEM数据,而3mDEM 是源于LIDAR(机载激光雷达)数据的产品, 比其它两种包含更多的地形细节。
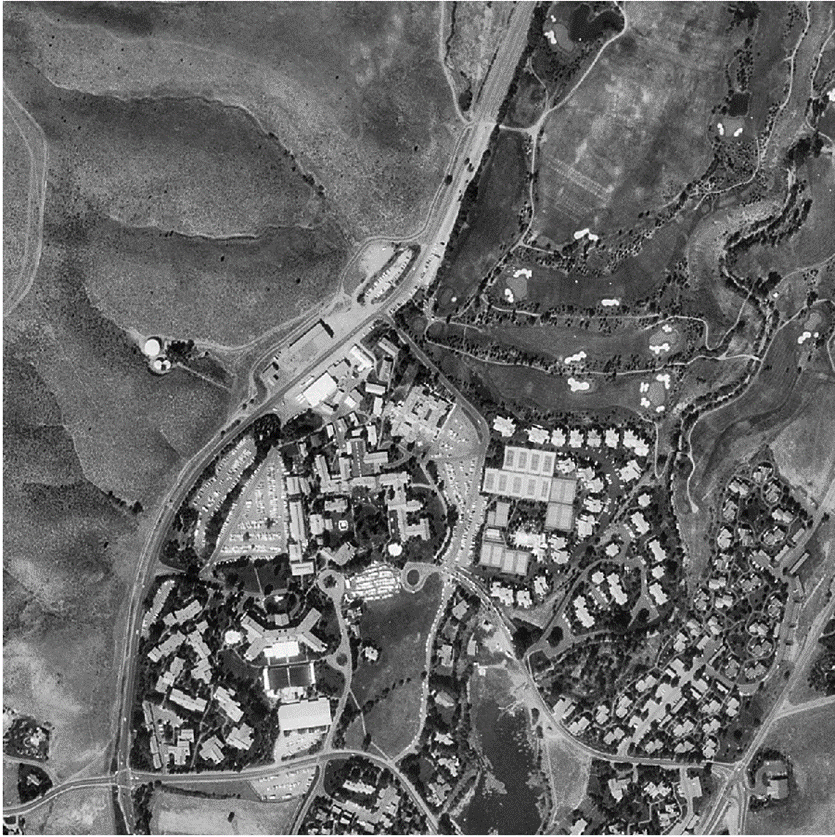
图4.5
USGS的 1m 黑白数字正射影像(爱达荷州太阳谷)。
数字正射影像(DOQ)是一种由航片或其它遥感数据制备而得的数字化影像,其中由于照相机镜头倾斜和地形起伏引起的位移已被消除。
土地覆被数据
■从遥感影像上获取的土地覆被数据,通常被用来分类和编译,因此常用作栅格数据。
■美国地质调查局提供一个系列三期国家土地覆被数据库: NLCD 2001, NLCD 2006 和 NLCD2011。
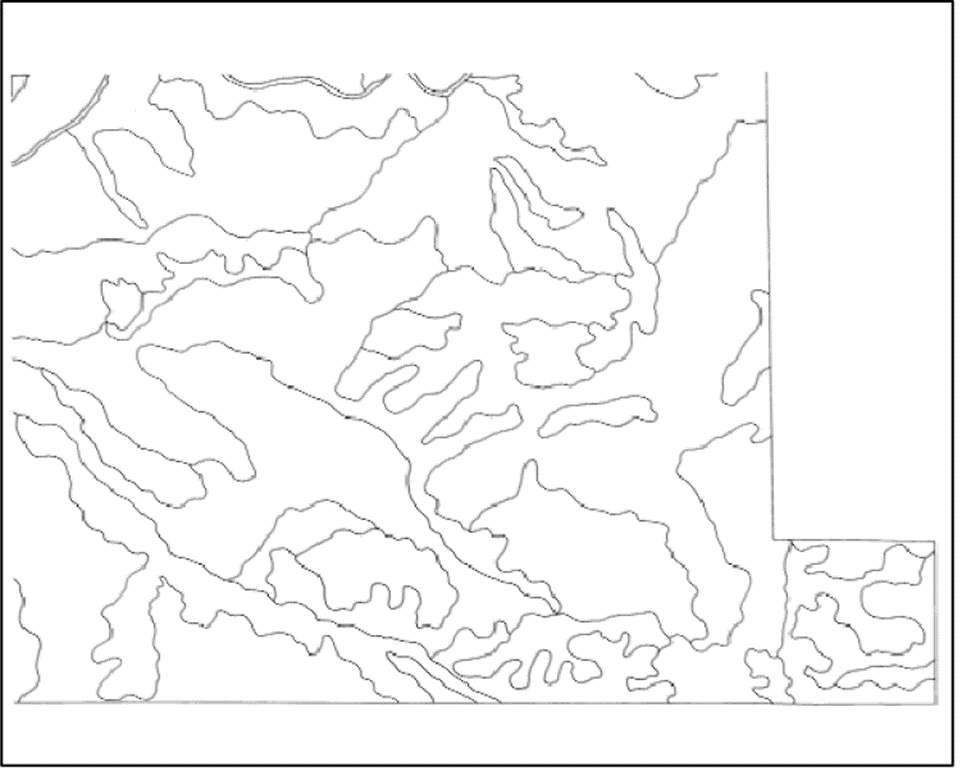
图4.6
显示土壤界线的二值扫描文件。二值扫描文件是含数值 1 或数值0 的扫描图像。
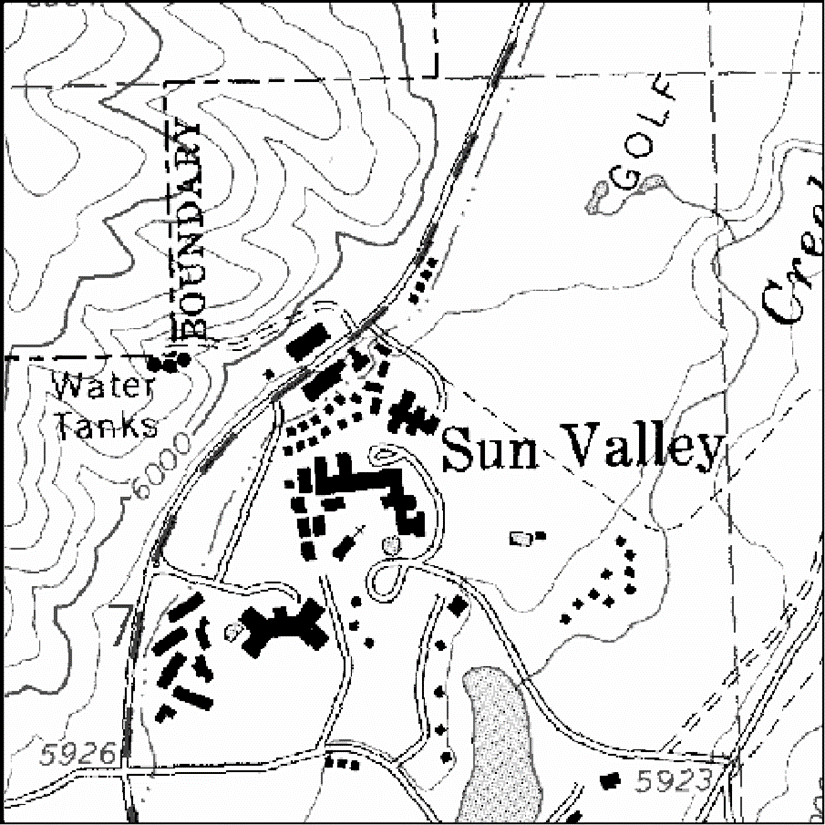
图4.7
爱达荷州太阳谷的数字栅格图(DRG),与图 4.5 中的数字正射影像图(DOQ)相比,该数字栅格图已经过期。数字栅格图是USGS地形图的扫描图像