一、 三维空间下点的表示
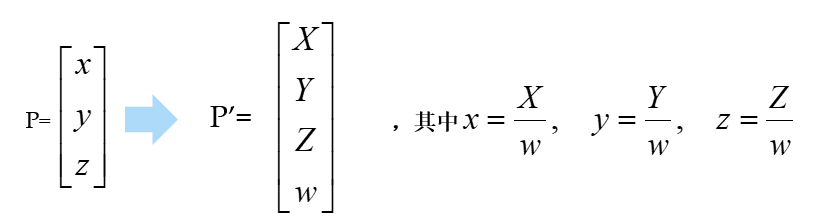
三维空间下,点的齐次坐标表示如下:
三维空间下的坐标系,满足右手定理。
二、 三维几何变换
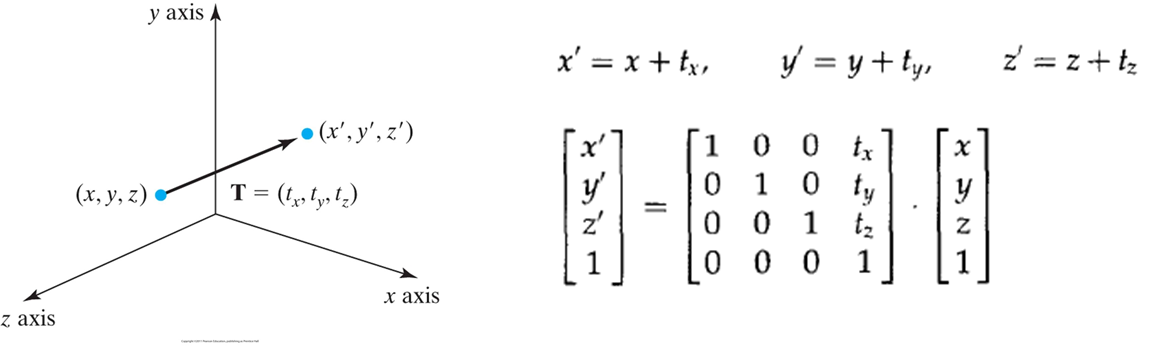
1. 三维平移变换
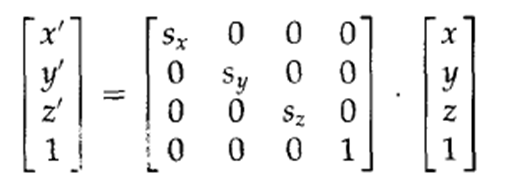
2. 三维缩放变换
1)相对于坐标原点的缩放变换
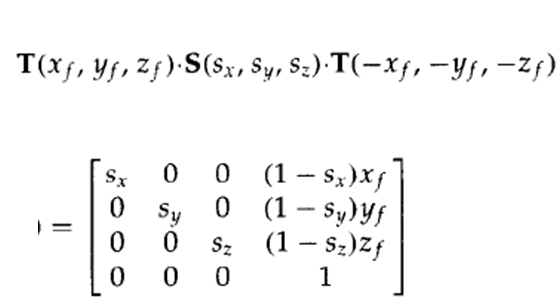
2)相对于任意点的缩放变换

3. 三维旋转变换
正负旋转角度----在右手坐标系下,相对坐标系原点绕坐标轴旋转相应角度(满足右手螺旋法则),逆时针旋转角度为正向。
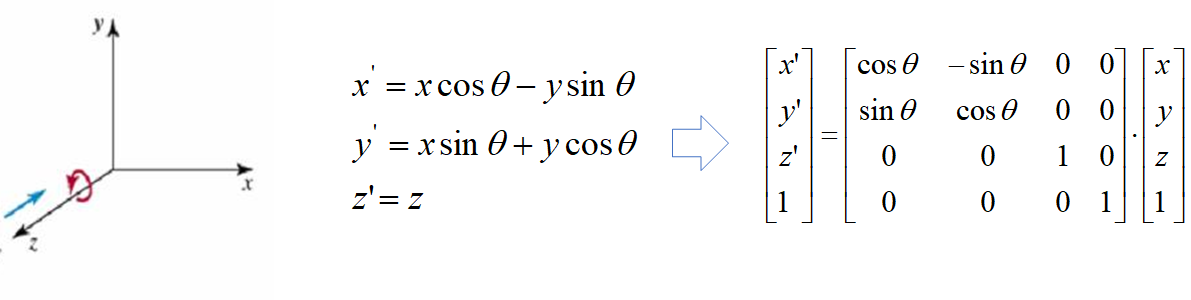
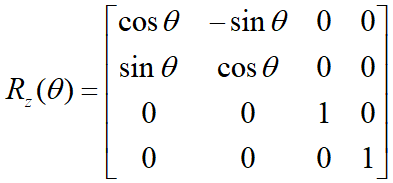
1)绕z轴旋转任意角度
2)绕x轴旋转任意角度
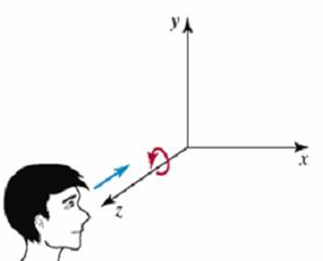
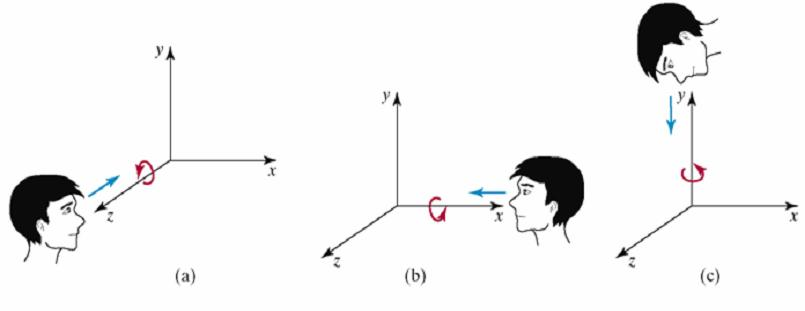
以绕z轴旋转作为参考,先将坐标轴进行参数替换,然后将变换公式中进行同样的参数替换,即可得绕x轴旋转的变换矩阵。如下图所示,用x代替z、用z代替y、用y代替z,则得到新的坐标系:
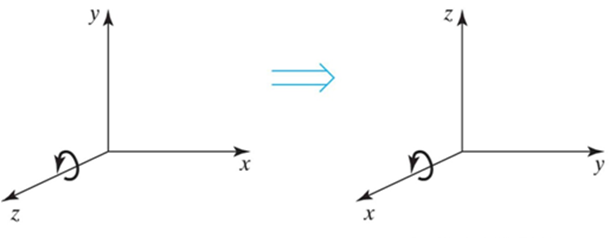
将变换矩阵中的参数,进行同样的替换,即用x代替z、用z代替y、用y代替z,得绕x轴旋转的变换矩阵:

3)绕y轴旋转任意角度
同理,首先进行坐标系的参数替换,如下图:
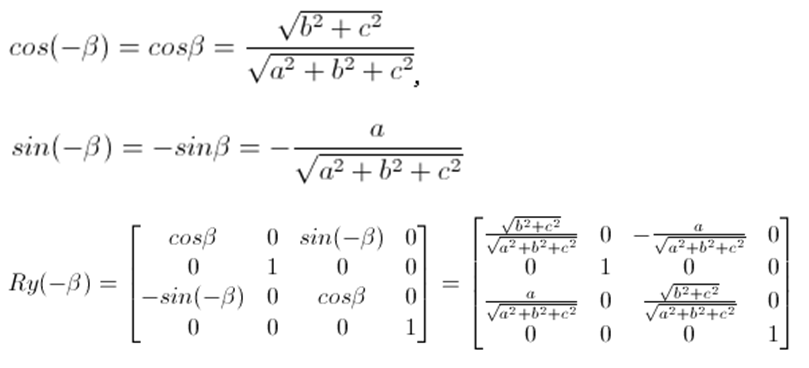
然后,将变换公式中的参数进行同样的替换,得绕y轴旋转的变换矩阵:

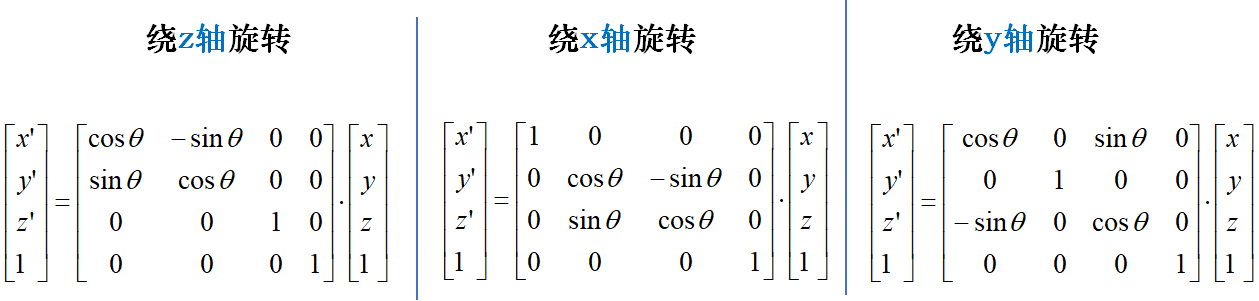
三维空间下,绕z轴、x轴、y轴旋转的变换矩阵,总结如下:
4)绕任意直线旋转任意角度
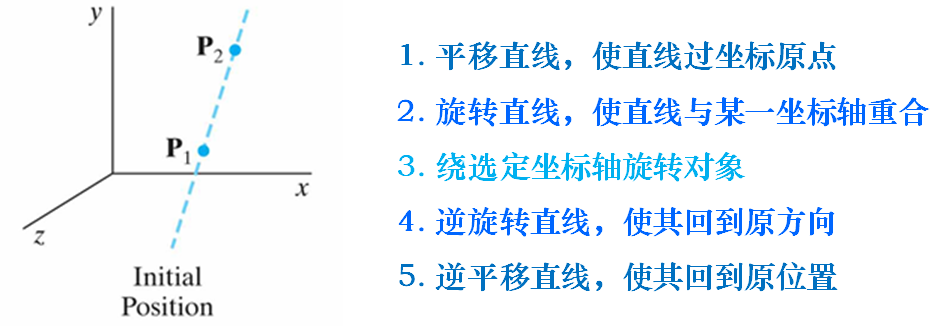
给定两点p1p2确定的一条直线,将空间中的点p绕直线p1p2旋转指定角度,可以通过五个步骤进行实现。
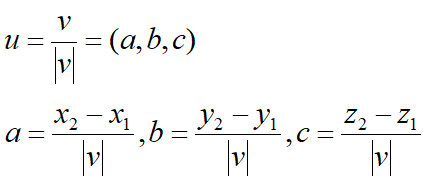
a. 定义旋转向量
![]()
b. 给出沿旋转向量方向的单位矩阵
五步变换的图示如下:
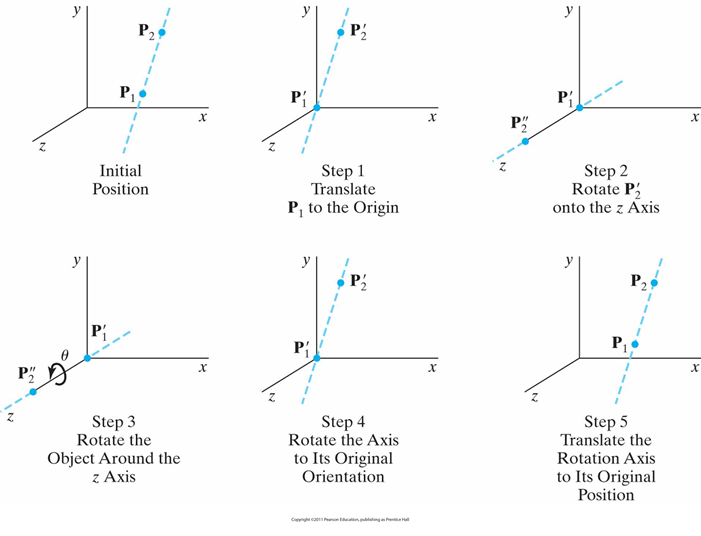
五步变换的变换矩阵,利用以下步骤给出:
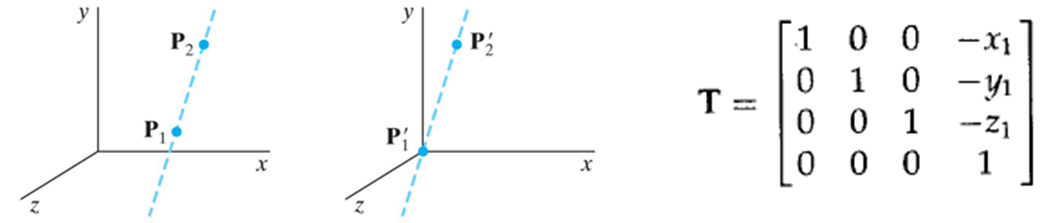
第一步:平移变换
将任意直线进行相应位移的平移,使该直线经过坐标原点
第二步:绕坐标轴的旋转变换 -- 两次旋转
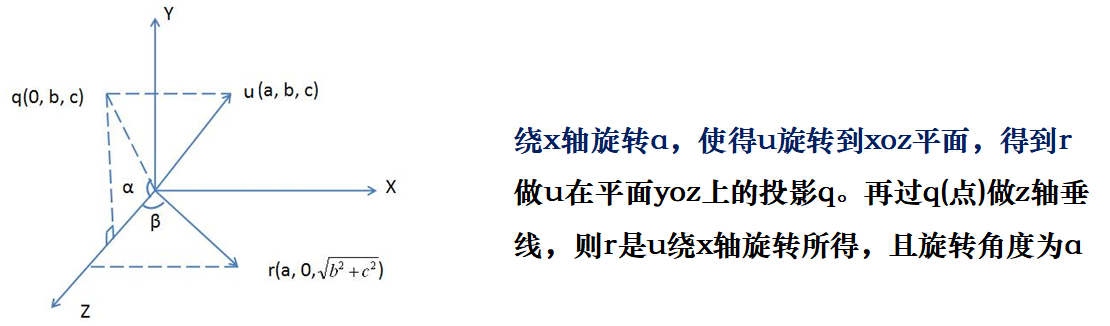
将经过坐标原点的直线,进行两次旋转,使直线与坐标轴z轴重合。例如,先将直线绕x轴旋转一定角度,使直线旋转到xoz平面内;然后将直线绕y轴旋转一定角度,使直线与z轴重合。具体过程如下:
首先,将任意直线旋转到xoz平面内。
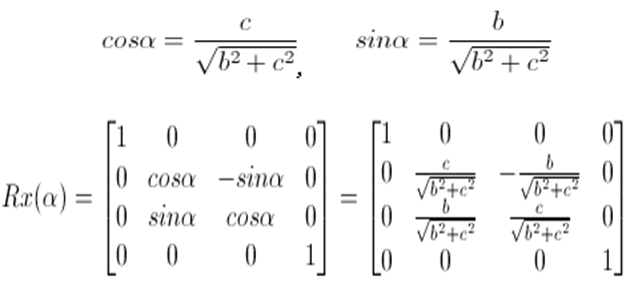
然后,将任意直线旋转到与z轴重合。
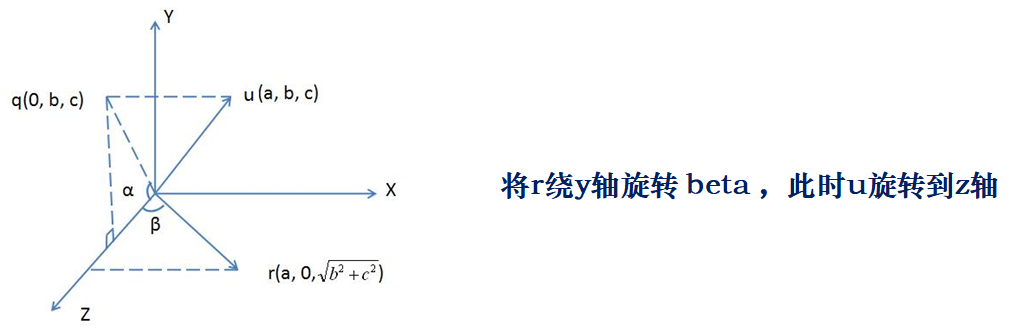
第三步:绕任意直线的旋转变换
此时,任意直线与z轴重合,所以绕任意直线旋转指定角度,相当于绕z轴旋转指定角度。变换矩阵如下:
第四步:绕坐标轴的逆旋转变换 -- 两次旋转
此时,做第二步的逆操作。首先绕y轴逆旋转相应角度,将任意直线旋转回xoz平面内;然后绕x轴逆旋转相应角度,将直线旋转回过坐标原点的任意直线。
第五步:逆平移变换
此时,做第一步的逆操作。将过坐标原点的任意直线平移相应的位移,使其恢复原来的位置。
将上述五个步骤进行总结,得到绕任意直线旋转指定角度的变换矩阵如下;
![]()
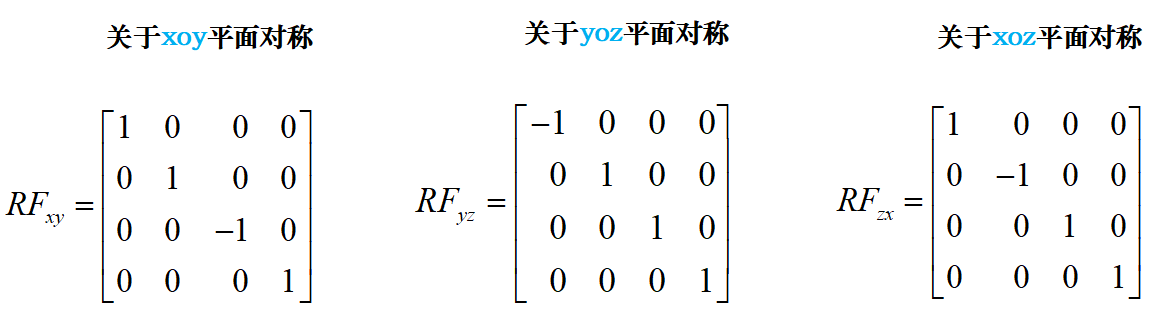
4. 三维对称变换